由于装备制造过程极其复杂,所用设备系统资源价格昂贵、成本高,传统实验设备台套数有限,制造实验通常采用观摩方法,学生动手实作机会很少。并且,学生理论学习后就直接进行加工实验存在很多问题,如数控编程后直接进行数控加工,可能存在编程考虑不周,不熟悉加工设备环境等问题、容易造成打刀、损坏机床设备,甚至造成人身安全事故。而通过设置制造虚拟仿真实验使上述问题均得以解决,使学生都能在虚拟制造过程中得到动手锻炼的机会,感受真实的加工过程,锻炼学生综合的专业技能和工程实践及创新的能力。
该模块主要针对装备制造的部分专业课程实验进行仿真,面向机械设计制造及其自动化专业、机械电子专业本科学生和研究生使用,制造模块的逻辑结构如图所示。
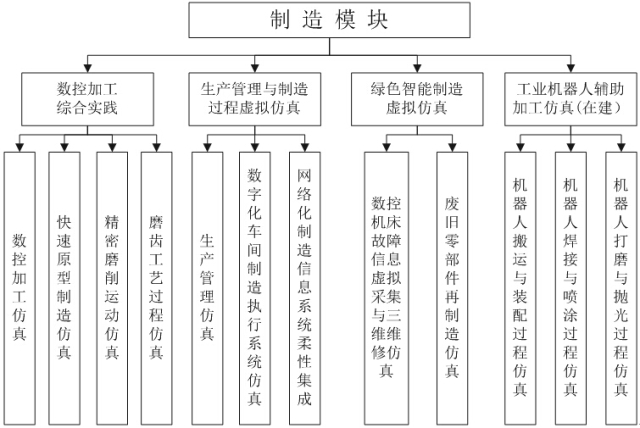
制造虚拟仿真实验模块的构成图
本模块包括4个子模块:数控加工综合实践、生产管理与制造过程虚拟仿真、绿色智能制造虚拟仿真、工业机器人辅助加工仿真等,每一个子模块都自成一个独立的仿真系统,对应于4个子模块开设的仿真实验项目如表所示。
制造模块仿真实验项目表
模块 |
实验项目名称 |
实验内容 (功能) |
效果与特色 |
类型 |
数控加工综合实践 |
数控加工仿真 |
采用MasterCAM数控编程,完成机械零件的数控仿真加工并在TV5 立式加工中心进行验证。 |
通过学生自主设计机械零件三维实体模型,进行数控加工和快速成型加工仿真模拟,再进行实验验证,完成零件从设计到制造的整个过程,使学生得到一个综合性的专业实践训练。可使学生熟悉机械零件的三维实体建模、数控编程仿真加工、快速原型数据离散实体堆积仿真等过程,掌握CAD软件(Pro/E,UG等)、MasterCAM、Rpprogram等软件的使用,从而培养学生综合的专业技能和工程实践及创新能力。 特色是通过仿真虚拟加工,可规避实际加工过程的危险性,避免学生安全事故的发生,还可节约大量的实验耗材和设备费用。 |
综合型 |
快速原型制造仿真 |
运用快速成型加工原理,仿真加工机械零件,在紫外光快速机上加工出原型零件实体。 |
综合型 |
精密磨削运动仿真 |
应用复杂曲面多轴联动精密磨削运动仿真系统软件,开展典型复杂曲面零部件的精密磨削工艺分析、多轴联动运动方法、精密磨削机床的功能分析、多轴联动运动各轴布置方法、基于AUTOCAD、CAXA、Solidworks、UG、Pro/E等软件的磨床零部件设计及装配、实现多轴联动精密磨削运动仿真。 |
综合型 |
磨齿工艺过程仿真 |
应用复杂曲面多轴联动精密磨削运动仿真系统软件,开展典型复杂曲面零部件的精密磨削工艺分析、多轴联动运动方法、精密磨削机床的功能分析等。 |
综合型 |
生产管理与制造过程虚拟仿真 |
生产管理仿真 |
通过分组进行产品的装配,测试生产周期,挖掘生产瓶颈,优化生产流程,实验内容包括生产组织仿真、生产计划仿真和生产控制仿真 |
通过图形仿真引擎对过程进行仿真和分析。得到诸如可视性、可达性、可维护性、可制造性、最佳效能等等方面的最优化数据。 |
综合型 |
数字化车间制造执行系统仿真 |
应用制造执行系统(MES)软件,开展典型机械加工车间生产计划和任务管理、生产过程工艺管理、生产过程质量管理、生产过程物料管理、生产过程设备管理、生产过程能耗管理、生产过程技术资料管理、生产过程综合查询和统计分析等MES功能模块的模拟运行和操作。 |
让学生了解并掌握数字化车间的概念、组成和运行模式,了解和掌握制造执行系统(MES)的概念、原理、功能和运行流程,了解和掌握典型机械加工车间生产计划全程管控、生产设备信息实时采集、加工质量动态监控、生产物料精益管控等先进管理思想和实现方法。 |
综合型 |
网络化制造中信息系统柔性集成 |
部署语义网关使能工具集;利用应用系统配置工具,分别提取和配置ERP/MES系统语义;利用语义网关配置工具,定义语义网关的语义描述标准,ERP与语义网关、MES与语义网关之间的语义映射;运行信息化应用系统服务程序及语义网关服务程序,在使能工具支持下,ERP/MES集成应用的运行过程。(以ERP/MES“工单”数据同步为例)。 |
网络化制造环境下信息系统柔性集成模块是一种松耦合的、柔性的异构系统集成方式,不需要对原有信息系统做任何基于源代码的二次开发,而只需利用语义网关所包含的一系列使能工具,对语义网关作相应的配置,就可实现异构系统的集成运行。让学生了解系统集成的方法。 |
综合型 |
绿色 智能制造虚拟仿真 |
数控机床故障信息虚拟采集与三维维修仿真 |
开展机床故障信息的实时采集,借助Protégé编辑工具故障知识结构和规则,形成故障诊断知识库;并利用驻留其上的知识库和推理工具实现推理,从而完成故障信息的采集和验证。 运用三维建模软件进行三维建模,规划出零部件的装配、拆卸路径,根据路径对其进行装配、拆卸操作,使其形成一定的装配体或拆卸出某一零件。 |
通过三维扫描与增材再制造修复实验平台以及机床实时采集实验平台让学生进行三维反求、虚拟增材修复、零部件强度仿真、故障信息采集、能耗信息采集等实验,配合对应教学课程的安排和内容,使学生对绿色制造、智能制造有了比较全面的认识,熟练使用Catia、Imageware等逆向建模软件。 本仿真实验不需要消耗能量,也不生产实际商品,通过三维扫描与增材再制造修复实验平台进行三维反求、虚拟增材修复、零部件强度仿真等实验,提高了实验的效率与实验教学质量。配合对应教学课程的安排和内容,加深学生对绿色制造与再制造知识的理解。 |
|
|
废旧零部件再制造仿真 |
采用三维光学扫描设备对某废旧零部件表面形貌进行快速精密测量,得到废旧零部件的外观点云数据。利用Catia等逆向建模软件,反求出废旧零部件的实体三维模型。 根据磨损缺失部位的模型,计算激光熔敷路径及材料用量,并在反求三维模型上进行多次虚拟增材修复。 分别对单一载荷作用下的再制造叶轮进行强度仿真,然后将所有结果进行综合分析,得出再制造后叶轮服役强度特点对服役可靠性的影响。 |
综合型 |
工业机器人辅助加工仿真 |
机器人搬运与装配过程仿真 |
利用工业机器人离线仿真系统,根据给定工作目标,完成六自由度工业机器人工件抓取、搬运、码垛及装配等作业的轨迹规划仿真,并探索两台机器人双机协同配装以及基于视觉识别系统的零件分拣作业的虚拟仿真及轨迹优化。 |
通过工业机器人离线综合仿真系统,让学生完成工业机器人焊接、喷涂、搬运、装配等实际作业仿真与优化,熟悉和掌握工程背景下机器人在智能制造系统的应用,加深对理论课程学习的理解和兴趣。 特色是通过虚实高度结合的实验平台,通过仿真系统对工业机器人辅助加工过程进行仿真,为学生提供了模拟真实作业情况的自主学习体验,也可对机器人系统进行故障模拟和作业测试,有效降低实践教学的成本和安全风险。 |
综合型 |
机器人焊接与喷涂过程仿真 |
利用工业机器人离线仿真系统,根据给定工作目标,完成六自由度工业机器人焊接与喷涂作业的轨迹规划仿真,并探索双自由度变位机与机器人协同作业的虚拟仿真及轨迹优化。 |
综合型 |
机器人打磨与抛光过程仿真 |
利用工业机器人离线仿真系统,根据给定工作目标,完成六自由度工业机器人与砂轮打磨/布袋抛光机双机配合的打磨与抛光作业的轨迹规划仿真及优化。 |
综合型 |
